 |
Audio Asylum Thread Printer Get a view of an entire thread on one page |
For Sale Ads |
|
|
Audio Asylum Thread Printer Get a view of an entire thread on one page |
For Sale Ads |
216.57.146.233
Fellow Inmates,I'm thinking of getting a VPI SDS for my Aries 1 table and just ran across the unit below.
Anybody here have experience with this unit? Looks like it has more than the SDS at roughly half the cost. Stick with the VPI unit instead? I like the smaller size and the tachometer adds a really nice feature but the VPI is a proven workhorse.
Thanks!
Edits: 05/13/14Follow Ups:
Quote: " Soooooo, what is the final conclusion about this Phoenix product? Is it as good as or better than the SDS? "Just ran across this on another blog (DIYAudio). Interesting expos� on the SDS....
Edits: 02/06/15
Pyfite,
What did you end up doing? I'm considering the same products on a Scoutmaster.
I have a VPI Scout. I bought the Roadrunner thinking that if the speed variation is significant, I would buy the Falcon as well. It arrived Monday. When I first installed, speed was varying between 33.250 and 33.295. After two sides, speed increased to 33.290 to 33.359.
I checked it this morning, it has exceeded 33.410 several times. Odd that it didn't return to the 33.25 range after being off all night.
The Roadrunner and table motor are plugged into a PS Audio PPP.
At this point, I do not know how much variation I will see over time. However, I can only wonder how much audible difference there is between a steady 33.333 and what I get now????
Soooooo, what is the final conclusion about this Phoenix product? Is it as good as or better than the SDS?
VPI SDS or Phoenix Engineering Falcon?
They are fairly close in what they both do, but quite different in how they achieve it and how it is presented.
The SDS displays the speed in Hz; the user must compute the number and fractional part of Hz to adjust the speed appropiately based on the pulley size used (0.1 RPM = 0.18Hz, 0.15Hz, 0.133333Hz or 0.111111Hz depending on pulley/spindle used).
The Falcon displays RPM and is adjustable in 0.1 RPM and 0.01 RPM steps by the user. Since it uses DDS technology, it can adjust the frequency in ~35�Hz steps and when connected to the RoadRunner Tach, can adjust the speed in 0.000416666 Hz steps.
The other main differences are size and price. The Falcon is the size of a pack of cigarettes; The SDS is a 19" rack mount (12" x 19" x 3").
The Falcon is $379 retail, the SDS is $1200.
Great to see you commenting here, Phoenix. Very interesting product. And from someone in a neighboring state (tho Go Bears!). Great stuff that you have put together.
Also curious about the tachometer add-on. What audible benefit will it bring above and beyond the speed controller. If something like a KAB strobe is showing my speed to be stable, is there some benefit? Are there some set-ups that would benefit more from this than others?
Yea, sorry about that Julius Peppers thing...
The tach by itself would not provide any real sonic benefit other than ensuring the platter is at the right speed. It performs the same basic function as the KAB strobe, but much more accurately and with a direct read out rather than just fast/slow. At the edge of a 12" platter, a 0.01 RPM error translates to a recession or precession of ~0.006" per rev (about the thickness of card stock paper). It is very difficult to see this with the naked eye unless you track it over a longer period of time. The RoadRunner produces its 1st reading after 2 revs and updates every rev afterwards.
The Falcon PSU provides a stable clean AC source for the motor that in most cases will improve the sound. The problem I found was no matter how accurate and adjustable the power supply, the speed on belt drive tables are prone to drift over time. The speed is also extremely sensitive to belt tension, position on the pulley and other variables that are difficult to control. By connecting the tach output to the Falcon PSU, the speed is not only stable and clean, but remains accurate no matter what external variables try to influence it.
You can read a review done by one of my beta test sites here:
A couple of quick questions:
It's not clear from the photos of the product. Can the male AC plug of the table simply be plugged into the unit?
How low can the voltage be dropped following startup?
Any issues with stacking the Roadrunner on top of the controller?
You can download the manual for the Falcon at:
The Falcon PSU comes standard with an NEMA 5-15 (North American) socket that will accept a 2 or 3 prong male AC plug. It can also be ordered with an IEC 60320 C13 socket that will plug directly into a VPI SAMA for instance.
The voltage reduction is front panel programmable with a range of 100% (115VAC/no reduction) to ~75% (~85VAC).
No restriction on stacking either unit on top of the other. The cable that connects them is 30", although at least one user has replaced it with a 6ft cable with no problem (they communicate over a 3 conductor serial cable at 9600 RS232).
Mark-
Thanks for the kind words. I've followed some of your threads for quite some time and have always admired your depth of knowledge.
FWIW, I originally did a dual phase output version of the Falcon, but because of the small size, I couldn't dissipate the heat. The other problem for a commercial offering (as you noted) is cabling and having to modify the motor wiring. Also raises some compliance issues. It is an interesting design for DIYers but I saw too many headaches with a commercial version.
I also noted that reducing the voltage output once the platter was up to speed had more of an effect on reducing vibration than phase adjustment did (the Falcon does the voltage reduction after ~3 sec). Also, the standard output is 60Hz for 33.3 RPM and 81 Hz for 45. Most of the other offerings run 60Hz for 45 RPM and 44.4444Hz for 33.3 RPM, but the motors really cog alot more at 44 Hz. So running the motors at the higher RPM also reduces vibration and at 33.3 RPM, the phase cap is still correct (60Hz).
This is all front panel selectable on the Falcon (you can run 44.4Hz/60Hz if you want to) as you can select 50/60Hz and Small/Large spindle to match your pulley arrangement.
You may be interested to know that the first iteration of the controller for Saskia was going to use DDS to synthesise the three sinewaves. We walked away from that when the person who was going to do the control interface with the DDS chip didn't produce the goods and I came up with the hybrid DAC circuit I still use.
Mark Kelly
Edits: 05/14/14 05/14/14
You probably have more control over the waveform than I do, probably something closer to an ARB?
Let me know if ever need someone to put together some code for DDS or anything else for that matter. I've been writing this stuff for 20+ years for a living on 8051 derivatives and Mot 6800 series �Ps. Maybe I could barter some of my services for some of your wine?
You've got mail
Mark Kelly
I have been using the Phoenix Audio Falcon unit, with the Roadrunner tachometer for about a month now.
I have not used any other speed control device. So I cannot compare. I have been watching the K&K site for more than a year waiting for Kevin to put his out there, and finally gave up. I do love his Maxxed Phono Amp.
The Roadrunner is quiet, and with the ongoing tachometer control link, the speed is very stable. I was playing some organ for my father this past weekend, and really noticed the speed stability helping the low notes, with absolutely black silence when there was supposed to be. The needle drop was so quiet, he missed it and almost jumped when the organ started up.
I like the system. Well priced, great function. No mods to the VPI system at all. Importantly for me, I am no longer afraid of 45 speed records. Previously I had to reset the band and pulleys for 45, get the strobe out to fine tune it. Going back to 33 required the same.
Lots of good info, thanks everyone!
Thanks!
"Hope is a good thing. Maybe, the best of things. And no good thing ever dies."
Technically, the Phoenix unit is vastly superior to the VPI, using modern techniques for waveshaping etc which were not available when the SDS was designed.The unit came out of some threads on DIY audio.com (see below).
Mark Kelly
Edits: 05/13/14
They seem to require more power. I used a sig generator and amp to power a LP12 easily as it is a 3W I believe (Premotech?). However, the idler damn near ate the amp, as it draws a lot more power.
As you note, idlers need more power, typically 15 - 20 watts. I find that having a further reserve is beneficial, so the controllers I make for idler type TTs are designed for a minimum 30W output.
Mark Kelly
I use these with my AR ES-1 and EB-101. Speed stability is outstanding, easy to set up, and the voltage and RPM can be adjusted. I used a handheld digital RPM meter to calibrate the speed. Ask the seller about compatibility with the VPI turntable you are using. I tried a Music Hall Cruise Control and the Falcon power supply has more adjust-ability.
TR

What kind of sonic benefits would you attribute to using the Falcon supply?
A deeper definition, PRAT, come to mind. The sound just has some "punch" it doesn't have without the power supply. Piano music has a steadiness that is hard to duplicate outside of a live concert.
TR
I just use a small Variac on my Aries. Start the turntable at 115v and then spin it back to 60v for vinyl playback. ~$50. Doesn't totally isolate noise on the AC line, but reduces it by reducing the voltage.
Works good for me.
At $50, seems like a cheap experiment / tweak.
A variac cannot control the speed of an AC motor as it cannot alter the frequency.
That's true. But if the platter RPM is OK, then why would it need adjustment? Why reclock a 60hz signal to 60hz?
Very few TT run at exactly 33.33rpm. Too many variables at play: motor tolerance, pulley diameter, belt diameter, platter diameter etc. A motor (speed) controller allows for minute/fine adjustments to the line frequency therefore, allowing the user to set the speed at exactly 33.333.
In addition, Grid (60 hz) frequency will change throughout the day due to imbalance between electricity generation and consumption. The VPI SDS is a mini power regenerator which will produce both a stable voltage and frequency that is isolated from the grid.
How much does grid fre1quency change? Please provide actual frequency change. Be very precise because there is a large number of generators out there.
But please provide the frequency variation.
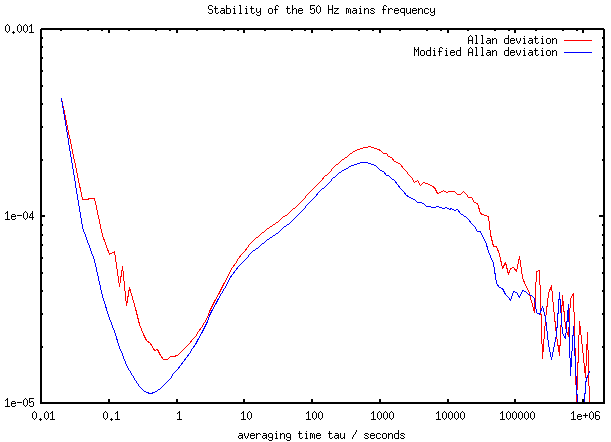
Allan deviation for a typical mains supply.
Mark Kelly
Edits: 05/14/14 05/14/14
For comparison, here's a selection of Quartz oscillators. Note that the top trace (plain jane TCXO) is 10,000 to 100,000 times better than the mains at the frequencies of interest.
You can ignore the bottom traces unless you are thinking of putting an atomic clock or a GPS receiver into your TT (which, BTW, I once did).
Mark Kelly
The US grid has specified a +/-0.5 Hz maximum variance over a sampled period of time. Since this variance is a sampled over of a period of time, daytime variances can be larger than night time variances.
Google "accuracy and stability of the 60 Hz mains frequency" and you will get more data and information.
The Variac acts nothing like the device in question, or like a VPI SDS. The Variac can only control line voltage in relation to input AC voltage from the wall. When power line voltage varies, the voltage output from the Variac will vary in direct proportion. You may be happy with the Variac; that's fine, but these other devices are far more sophisticated.
Why is it necessary to reclock a 60hz signal to 60hz? The SDS has a start voltage of 110 then automatically reduces the voltage to around 87v. That is done manually with the Variac. Small voltage variations get through the variac, but the % if variation is reduced proportional to the lowered voltage output from the Variac.
is that the motor develops less torque and thus runs more smoothly over the poles.
It's probably not the varying frequency from the utility that's the biggest problem with the power around here but the distorted waveform. Especially here in the US, the distortion on the grid can get pretty awful. The problem is when the motor designed to run smoothly with sine waves responds to the distortion with unwanted torque.Of course, if the motor runs at the wrong speed....variable frequency would be a great feature.
Edits: 05/13/14 05/13/14
I agree that the perfect sine wave is not always coming in through the wall. But the distortion is relatively small.
The question would be how much that slightly misshaped sine wave actually contributes to any sound when it runs through a rubber o-ring / belt to the heavy platter. And consider that with the motor running at about half voltage (60v from the Variac), the "noise" would be reduced by that much into the belt because the torque would be less with the lower voltage.
Yes it does. I used a LP12 for this experiment and using a regenerated sine wave improved the sound quite a bit. the Variac trick to lower the voltage works fairly well (and yes I use it.) but, it is not comparable to improving the power supply quality as that is a major improvement along the lines of buying a new table.
"But the distortion is relatively small."
LOL! good one.
No offense man but it sure sounds like you're trying to convince someone alright....
True sine inverters of sufficient quality are cheap these days, maybe you already have one. It's a quick and dirty method to answer these questions for yourself. If you find it helps then you think about the fancier controllers.
No offense, but you just fail to understand that the motor runs smoother at low voltage and therefore the small variations of sine wave don't matter.
I see you were offended. Not my intentions.
"Matter" is a relative term. Since you've merely scaled the energy available generating the unwanted torques with the variac, they will still be present whether or not you've deedmed them something that "matters". Cleaning up the distortion helps, and apparently per MK's posting, mixing in some 3rd harmonic can be useful. The problem here is the distortion typically seen on the grid is quite rich in harmonics other than fundamental and third. Besides, one likely wants to dial in the level of 3rd and not just leave the decision up to natural grid levels of 3rd.
No offense, but I didn't think you could come up with any reasonable answer. It's actually less than 1%, but the change happens over an extended period and will not be audible.
No offense, but you CAN'T hear the said distortions because the voltage on the motor has been reduced and goes smoothly through its rotation on low torque.
No offense, but your answers make no sense whatsoever. No offense, but you don't know what your talking about.
Sounds like you've really convinced yourself your right. Good luck with that. It's probably just mere coincidence that no one here seems to agree with what you say since after all you already know all there is to know on the subject....LOL...later
Ugly (fitting, eh?).... It is N O T the reclocking that makes the difference, it is the reduction in voltage and subsequent reduction in torque that makes the motor run smoother. If you had a clue about AC motors, you might understand. But it's obvious, that in your case, you cannot grasp such simple concepts.
No offense intended.
Carry on with your enlightened approach. It's working for you.
nt
IMO, a tachometer is a nifty device but really isn't necessary with a synchronous AC motor. Once you set frequency with a synchronous AC motor, it should simply stay there. Contrast this with a brushed DC motor which drifts over time and usually require some type of closed-loop feedback (such as a tachometer, etc) to properly regulate the speed of the motor.
While the SDS is a decent unit, the lack of parametric adjustment would bother me - I want to be able to control individual phase angle, voltage, frequency, and ideally add or subtract distortion artifacts (since contrary to popular belief, not all AC motors want to see a perfect sine wave).
If I were shopping for an AC controller today, I would look seriously at Kevin Carter's latest project:
http://www.audioasylum.com/cgi/vt.mpl?f=kandk&m=9857
Just my 2�.
The K&K unit will outperform any single phase unit such as SDS or Phoenix: two phase output with adjustable phase angle puts it into a different category.It does mean you have to rewire your table: this is what stopped development of the Synchrotron "SDS Killer"; we were in talks with a potential manufacturer but they wanted it to be plug and play and I insisted that it have two phases and adjustable quadrature.
You may be interested to know that I also included adjustable waveshaping: you are correct that a "perfect" sinewave is not the ideal waveshape for AC synch motors.
In retrospect I should have given in an introduced the two phase model later, but it's too late now.
Mark Kelly
Edits: 05/13/14
Hi Mark,
Thank you for taking the time to weigh in on products that you obviously have expertise in. Very helpful.
Any thoughts on pros and cons of the Pyramid and K&K type solutions compared to DC options like those that Origin Live offers?
My experience is slightly different from Richard's, probably becasue we have different concerns.IMO there are four areas where brushed DC motors are lacking at the current state of play.
They are designed to run at far higher speeds than are typical in TTs and with far lower radial (side) loads), so the bearings wear out quickly. As long as you accept that your motor will need replacement about as frequently as your stylus, this is possibly OK.
The other three are technical flaws with the control circuits due to commutation noise, thermal drift and long term stability. All fixable with the right circuit. I'll elaborate if asked but the explanation is very long and technical.
Mark Kelly
Edits: 05/14/14
I personally tried the Origin Live controller and found it wanting - the system (IMO) needed better closed-loop control, such as a hall effect sensor to provide adequate real time feedback; I personally loathe brushed DC motors for use in turntables. Yes, they are quiet, but controlling them easily is almost impossible. Brushless DC motors with integrated gear heads and controllers are far better in this respect, and have adequate torque ratings as well.
I would opt for the K&K solution over the Pyramid primarily for its ability to adjust phase angle, which allows the end user to fine-tune the motor for the least amount of vibration and cogging noise possible given the motor. In comparison, the SDS is a fairly crude instrument which fails completely in allowing the user to adjust their motor for the least amount of vibration (which is why VPIs will ALWAYS use a rubber belt - they have to in order to avoid motor noise transmission into the platter). I also like the fact that the K&K is open-loop. Listening back and forth recently between an open-loop AC controller (Mark Kelley's Synchrotron) and a closed-loop brushless DC design (an integrated Maxon custom design) has led me to the conclusion that I prefer an open-loop design for its more organic and dare I say musical presentation overall. Both controllers are excellent solutions, and I can happily live with either for both their respective strengths and weaknesses.
Thanks for the very helpful reply. You mention the respective strengths and weaknesses of AC and DC motors. Could you elaborate on what those are?
Quite the excellent education in this thread.
"You may be interested to know that I also included adjustable waveshaping: you are correct that a "perfect" sinewave is not the ideal waveshape for AC synch motors."
Don't know if Richard finds it interesting but I find it fascinating. What waveform is ideal?
For most synch motors there is a sginificant variation in magnetic reluctance with rotor position which occurs twice per pole / slot pairing. Mathematically this is equivalent to third harmonic distortion.
Empirically, I found third harmonic addition gave the best results.
Mark Kelly
That is fascinating. Do you have a way to measure the optimal profile for a given motor? It would be nothing for a processor/DAC combo to feed a drive an optimized waveform if only its profile was easy to determine.
The fly in the ointment is that the ideal waveform changes with motor load.The explanation for this is fairly long but I'll post it in a separate thread if you are interested.
Mark Kelly
Edits: 05/14/14
Sure a little fly ointment adds development complexities but if you can come up with a way to characterize the thing, processing power and memory are dirt cheap these days.
I'm game to read about your take on it if it isn't to much trouble for you writing it up, especially if you have ideas about why the profile shape is how it is. I hate typing and can't communicate but read pretty well.
Rather than starting a new thread, I'll answer what I can here.
The problem is not the processing required to make the waveshape, it's that the waveshape required continually changes. This arises because of the variable phase relationship between the rotating electrical field and the rotor itself: although a synchronous motor is frequency locked it isn't phase locked and the rotor lags the field by an amount that varies with torque demand.
Measuring this is not trivial.
Mark Kelly
Have you considered a low rez version to try and keep cost down but still offer advantage? perhaps just a few sensors, while not perfect, would be worth it when artfully integrated to your loop. I've not done air dielectric efield sensing personally so don't have much clue about the technology involved. Seems to be some deep pockets in the audio hobby.
According to the gentleman at Phoenix, the tach allows you to dial in speed precisely because it's giving you feedback on the actual speed of the platter, which could be off for a number of different reasons. I thought the same way as you, and I made essentially the same statement to Bill at Phoenix, and then he explained the benefit of the tach and my conclusion was that I wouldn't buy one without the other. also, the cost makes it a very nice addition to a VPI table, provided that it works as advertised and gets the same support an SDS would get from Harry at VPI.
Additionally, I was watching Harry spin records on his personal Classic 4 recently, and he has an SDS connected to his. When he went from a 33 to a 45 rpm record, I noticed he still moved the belt to the wide pulley. Even though the SDS allows speed change from 33 to 45, Harry did point out that the motor does have to work harder when it electrically increases its speed. I thought that was interesting and would follow Harry's lead should I ever own an SDS or similar.
"Hope is a good thing. Maybe, the best of things. And no good thing ever dies."
a Music hall Cruise Control clone. If so, it can handle AC motors up to 3 watts. The VPI draws 7 watts.

Opus 33 1/3
The bloke who developed it posts as "Pyramid" on DIY audio.It is far more sophisticated than the Music hall unit, using DDS waveshaping to generate the sinewaves for instance.
It has a rated output of 7 watts.
I had already stopped development controllers for synch motors but if I hadn't I would now.
Mark Kelly
Edits: 05/13/14
Opus 33 1/3
Part of what keeps costs down: they both use small extruded aluminium heatsink boxes, which all look a lot like each other.In contrast, I made the mistake of using custom made enclosures which cost me more than they're charging for a full unit.
Mark Kelly
Edits: 05/13/14 05/13/14 05/13/14
Are you sure about the 7 watts on the VPI? I know the Falcon/Phoenix combo are rated at 7 watts.
"Hope is a good thing. Maybe, the best of things. And no good thing ever dies."
Opus 33 1/3
Post a Followup:
| FAQ |
Post a Message! |
Forgot Password? |
|
||||||||||||||
|
||||||||||||||
This post is made possible by the generous support of people like you and our sponsors:

